Currently Empty: 0.00 € (0.00 лв.)
Живко Митев
- 18.11.2016
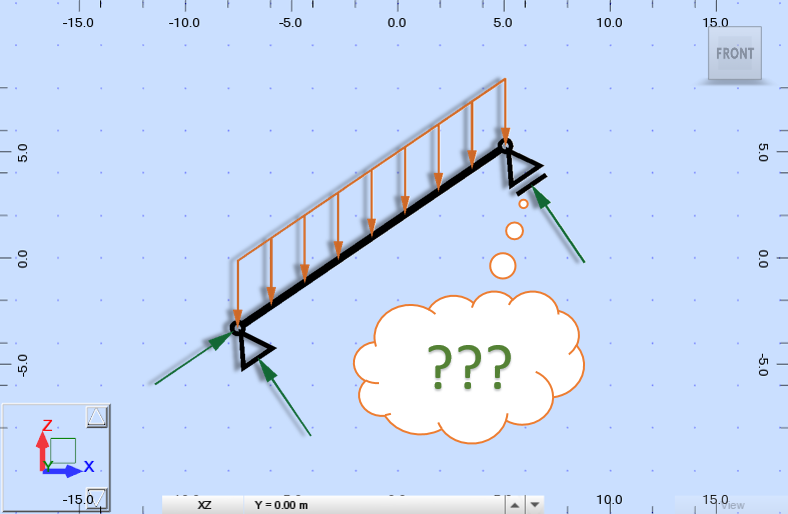
Как да моделираме наклонена опора в Robot
Понякога при моделиране на конструкцията в Robot Structural Analysis се налага използването на наклонена опора, която е завъртяна, така че да не е успоредна на осите на глобалната координатна система. Как това може да стане, след като възлите в Robot ( за разлика от прътите и плочите) нямат локална координатна система?